We build the future of robotics
A Science Club for Robotics and Unmanned Vehicles at Poznań University of Technology — from drones to a Mars rover.
We are CybAiR
Founded at Poznań University of Technology, we run projects in robotics, drones and autonomous systems.
We bring together students from different faculties to build interdisciplinary engineering projects with real impact.
Our mission →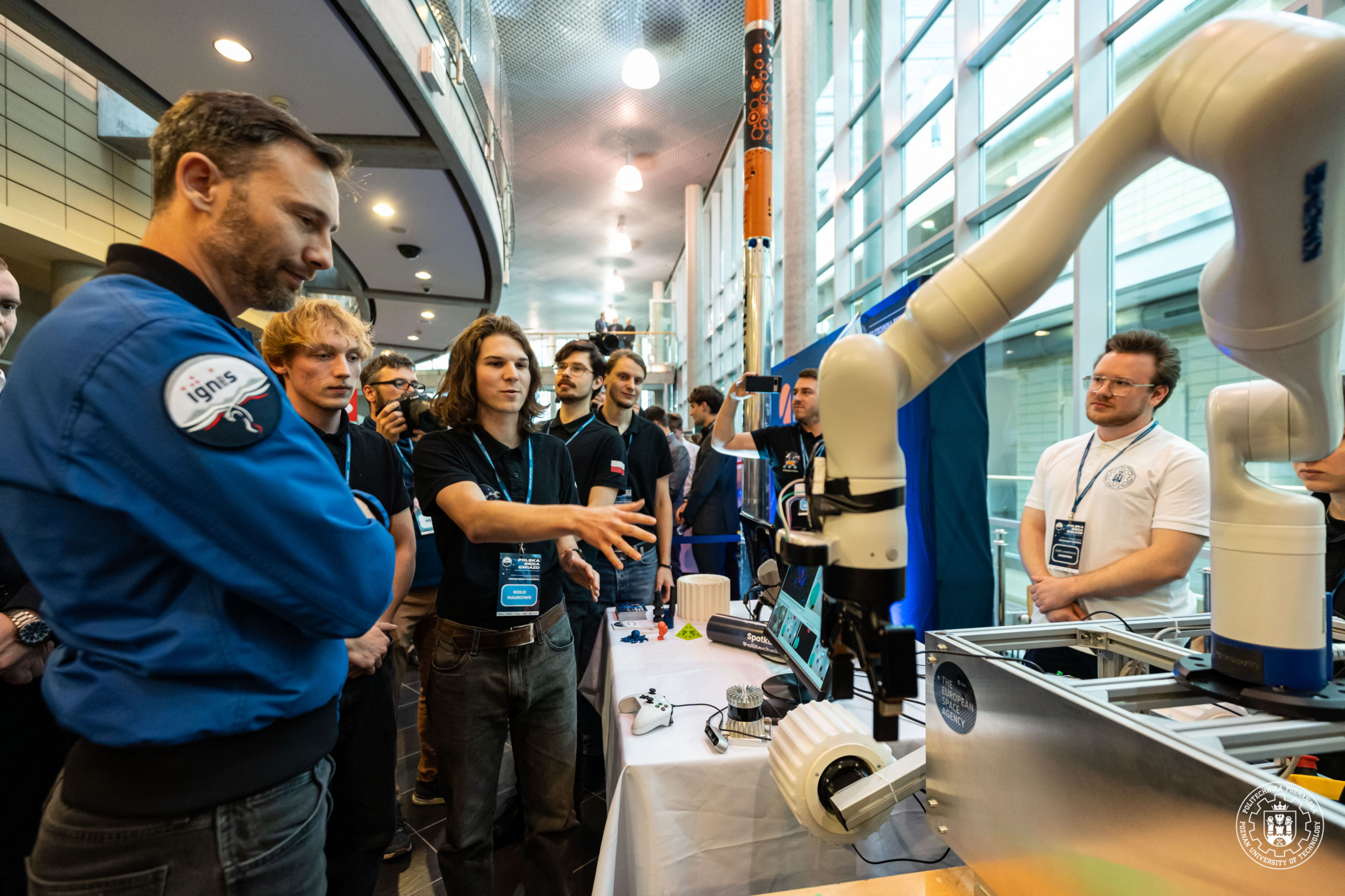
What do we do?
Drones
We build and program racing drones as well as autonomous competition vehicles.
Robotics
We create robots and autonomous systems from scratch — including planetary rovers.
Autonomy & Artificial Intelligence
Our projects use algorithms, AI and real-time control systems.
Competitions
We compete internationally — ERC, ARC and many others.
Our mission
We develop students’ engineering skills by working on real technology projects.
We believe you learn best by building — that’s why every project ends with something that actually works.
Explore the rover →
PUT Lunar Rover
Our interactive PUTLunarTeam logo — click an element on the graphic or choose from the list.
How to explore the rover?
Click any element on the graphic or choose from the list below.
Selecting an element will reveal details about the solutions we use.
- ⭐ LunarTeam
- 📦 Chassis
- 🛞 Suspension
- 📡 Mast
- 🦾 Robotic arm
⭐ LunarTeam
PUT Lunar Team is a student research club at Poznań University of Technology focused on building a lunar rover.
About us
- ERC — European Rover Challenge
- ARC — Anatolian Rover Challenge
📦 Chassis
The rover chassis is the main load-bearing structure made of a lightweight aluminum alloy.
Specification
- Material: …..
- Weight: …..
🛞 Suspension
The suspension system is based on two wheels……
Wheel parameters
- Diameter: ….
- Drive: …..
📡 Maszt
A communication mast with a directional antenna and a panoramic camera for remote navigation.
Connectivity
- Band: ……..
- Range: …….
🦾 Robotic arm
A 6-DOF robotic arm with a gripper for sampling and manipulation tasks.
Parameters
- Degrees of freedom: 6-DOF
- Payload: …..
- Control: ….
Our partners
Follow us on Facebook and stay up to date with our projects.
Find us on Facebook →