Budujemy przyszłość robotyki
Koło Naukowe Robotyki i Pojazdów Bezzałogowych Politechniki Poznańskiej — od dronów po łazik marsjański.
Jesteśmy KN CybAiR
Założone na Politechnice Poznańskiej, prowadzimy projekty z zakresu robotyki, dronów i systemów autonomicznych.
Łączymy studentów z różnych wydziałów, tworząc interdyscyplinarne projekty inżynierskie o realnym wpływie.
Nasze projekty →
Nasze projekty

Platforma badawcza
Modułowa platforma mobilna do badań i eksploracji w terenie. Baza pod nasz przyszły łazik na zawody. Dofinansowana w ramach programu SKNTI.
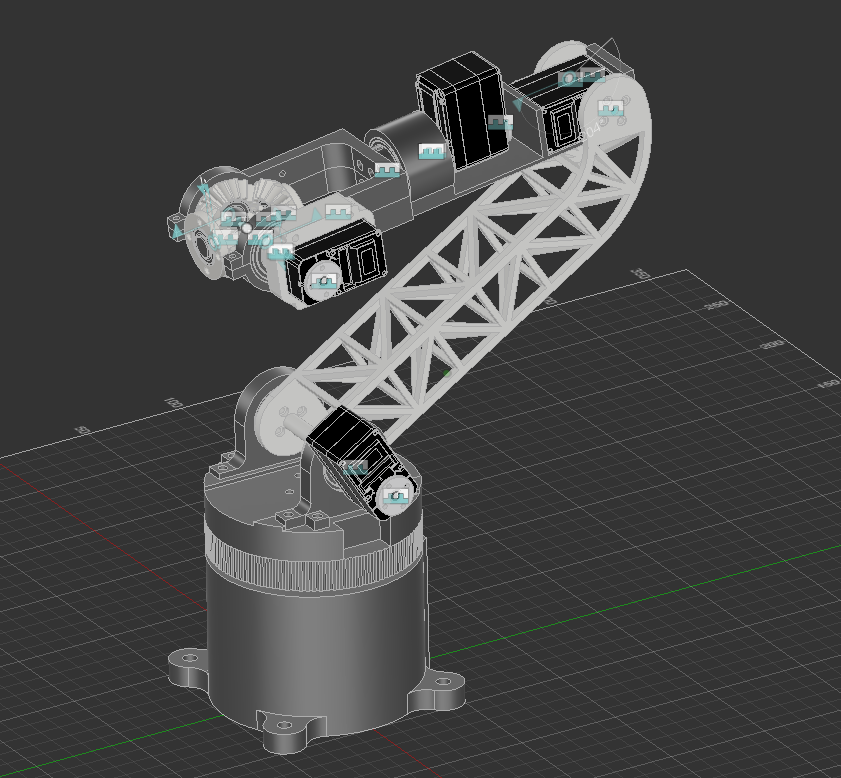
Manipulator łazika
Wielomodułowe ramię robotyczne z zintegrowanymi efektorami do pobierania próbek gleby finansowane dzięki programowi TurboGRANT fundacji Orlen.

Roboty SO-100ARM
Zestawy robotów SO-100ARM służące do zbierania danych i trenowania modeli VLA (Vision-Language-Action) oraz innych algorytmów uczenia maszynowego.
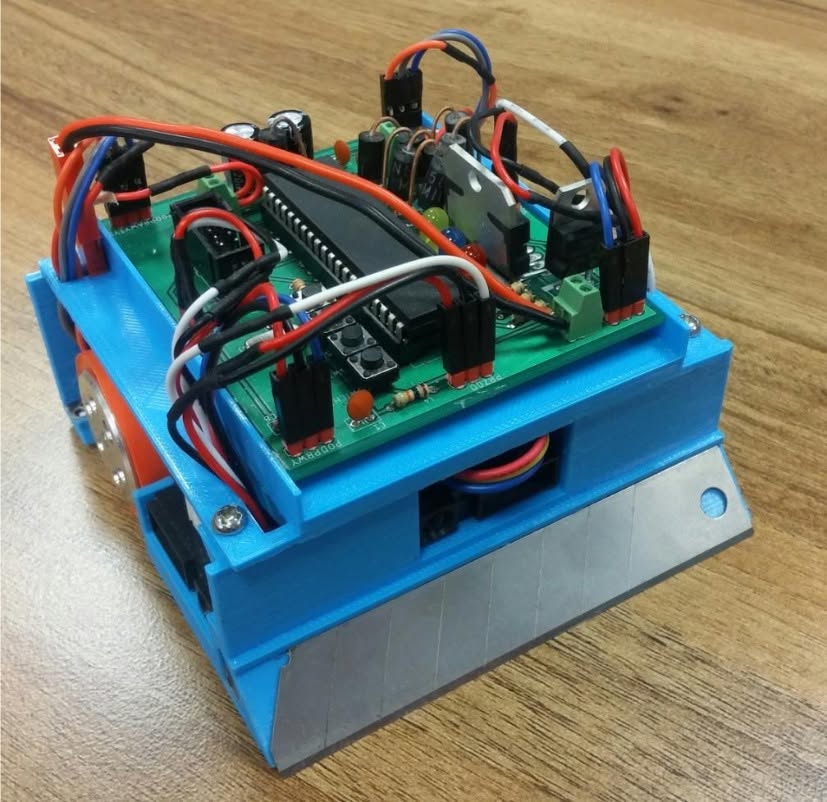
Roboty SUMO
Autonomiczne roboty sumo zaprojektowane pod kątem zawodów — własne płytki PCB, czujniki odległości i strategia działania.

Robot podwodny
Zdalnie sterowany pojazd podwodny (ROV) do eksploracji i inspekcji — własny napęd, kamera i obudowa wodoszczelna.
Drony
Budujemy drony i platformy latające. Na zawody i nie tylko.
Nasza misja
Rozwijamy kompetencje inżynierskie studentów poprzez pracę nad realnymi projektami technologicznymi.
Wierzymy, że najlepiej uczy się przez działanie — dlatego każdy projekt kończy się czymś, co faktycznie działa.
Poznaj łazik →
Poznaj nasz zespół

PUT Lunar Rover
Nasze interaktywne logo PUTLunarTeam — kliknij element na grafice lub wybierz z listy.
Jak eksplorować łazik?
Kliknij dowolny element na grafice lub wybierz z listy poniżej.
Wybranie elementu ukaże szczegóły wybranych przez nas rozwiązań.
- ⭐ LunarTeam
- 📦 Obudowa
- 🛞 Zawieszenie
- 📡 Maszt
- 🦾 Ramię
⭐ LunarTeam
PUT Lunar Team to główny zespół projektowy naszego koła naukoewgo zajmujący się budową łazika księżycowego.
O nas
- Zawody ERC — European Rover Challenge
- Zawody ARC — Anatolian Rover Challenge
📦 Obudowa
Obudowa łazika stanowi główną konstrukcję nośną wykonaną z lekkiego stopu aluminium.
Specyfikacja
- Materiał: …..
- Waga: …..
🛞 Zawieszenie
System zawieszenia oparty na dwóch kołach……
Parametry kół
- Średnica: ….
- Napęd: …..
📡 Maszt
Maszt komunikacyjny z anteną kierunkową i kamerą panoramiczną do nawigacji zdalnej.
Łączność
- Pasmo: ……..
- Zasięg: …….
🦾 Ramię
Ramię robotyczne 6-DOF z chwytakiem do pobierania próbek i zadań manipulacyjnych.
Parametry
- Stopnie swobody: 6-DOF
- Udźwig: …..
- Sterowanie: ….
Dofinansowania i granty
Mobilna Platforma Modułowa do Badań Terenowych
Projekt realizowany przez KN CybAiR Politechniki Poznańskiej otrzymał dofinansowanie ze środków budżetu państwa w ramach programu Studenckie Koła Tworzą Innowacje.
Środki przeznaczone są na budowę i rozwój modułowej platformy badawczej umożliwiającej prowadzenie badań i eksplorację w trudno dostępnych środowiskach. Jest ona również bazą pod naszego przyszłego łazika na zawody. Projekt łączy mechanikę, elektronikę oraz algorytmy sterowania w jedno zintegrowane rozwiązanie inżynierskie.

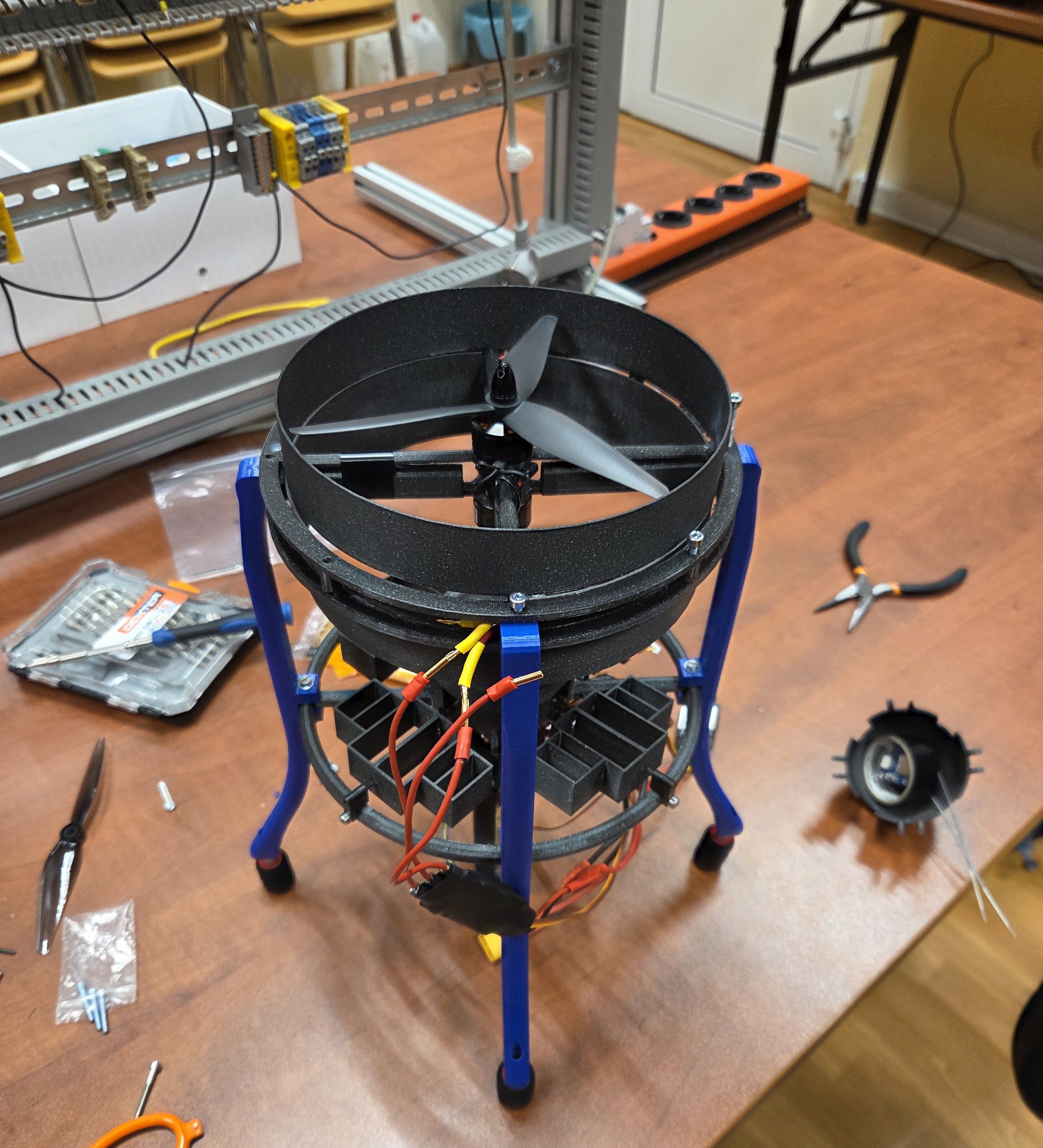
System autonomii lotu odporny na silne wiatry
Projekt „System autonomii lotu odporny na silne wiatry do celów akcji poszukiwawczych po klęskach żywiołowych”, realizowany przez KN CybAiR Politechniki Poznańskiej, otrzymał dofinansowanie ze środków budżetu państwa w ramach programu Studenckie Koła Tworzą Innowacje.
W ramach projektu budujemy i rozwijamy stanowiska badawcze do testowania algorytmów autonomii lotu odpornej na silny wiatr. Łączymy w nim algorytmy sterowania, estymację stanu oraz uczenie maszynowe, tworząc podstawę systemu umożliwiającego stabilny i bezpieczny lot dronów w trudnych warunkach atmosferycznych — z myślą o wsparciu akcji poszukiwawczych po klęskach żywiołowych.

Nasi partnerzy
Śledź nas na Facebooku i bądź na bieżąco z naszymi projektami.
Znajdź nas na Facebooku →