We build the future of robotics
A Science Club for Robotics and Unmanned Vehicles at Poznań University of Technology — from drones to a Mars rover.
We are CybAiR
Founded at Poznań University of Technology, we run projects in robotics, drones and autonomous systems.
We bring together students from different faculties to build interdisciplinary engineering projects with real impact.
Our projects →
Our projects

Research platform
A modular mobile platform for research and exploration in outdoor environments. The foundation for our future competition rover. Co-funded under the SKNTI programme.
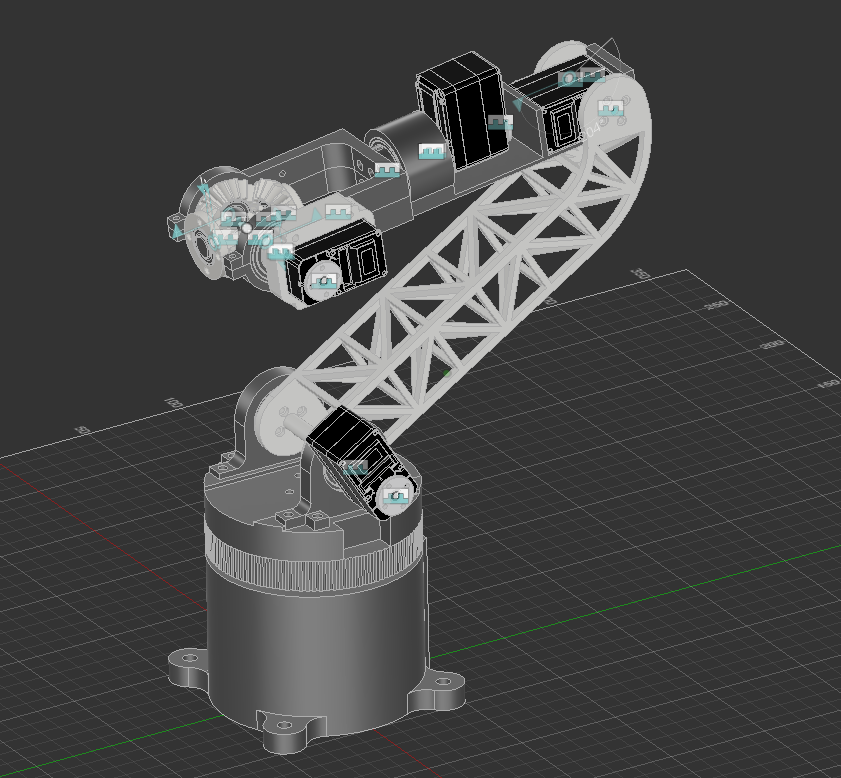
Rover manipulator
A multi-modular manipulator with integrated end-effectors for soil sampling, co-funded by the TurboGRANT program by the Orlen foundation.

SO-100ARM robots
SO-100ARM robot kits used for collecting data and training VLA (Vision-Language-Action) models, as well as other machine learning algorithms.
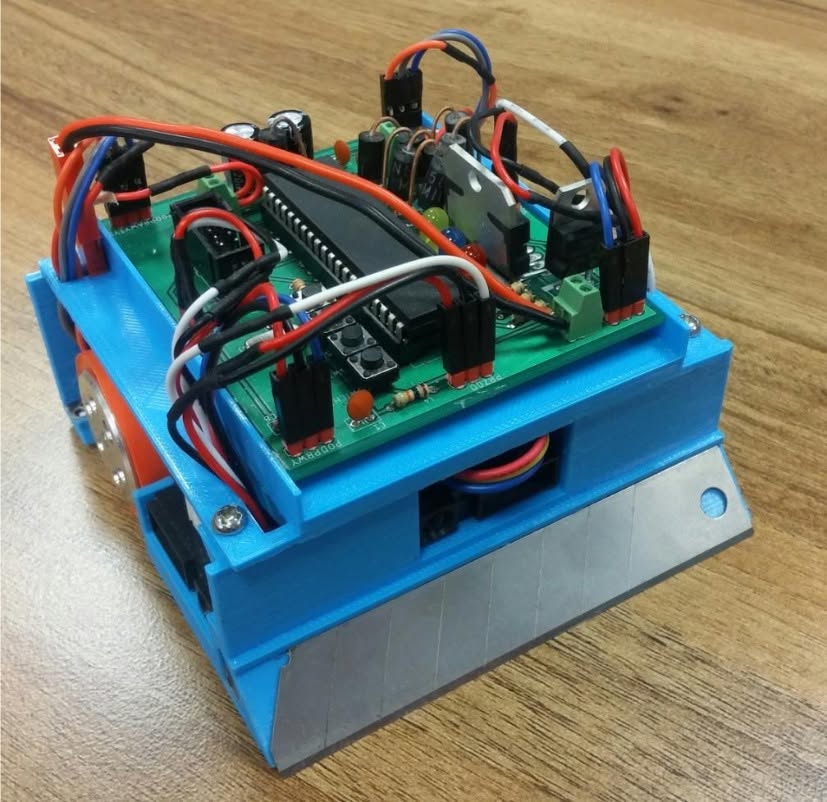
SUMO robots
Autonomous sumo robots designed for competitions — custom PCB boards, distance sensors and different strategies for the fights.

Underwater robot
A remotely operated underwater vehicle (ROV) for exploration and inspection — custom propulsion, camera and watertight housing.
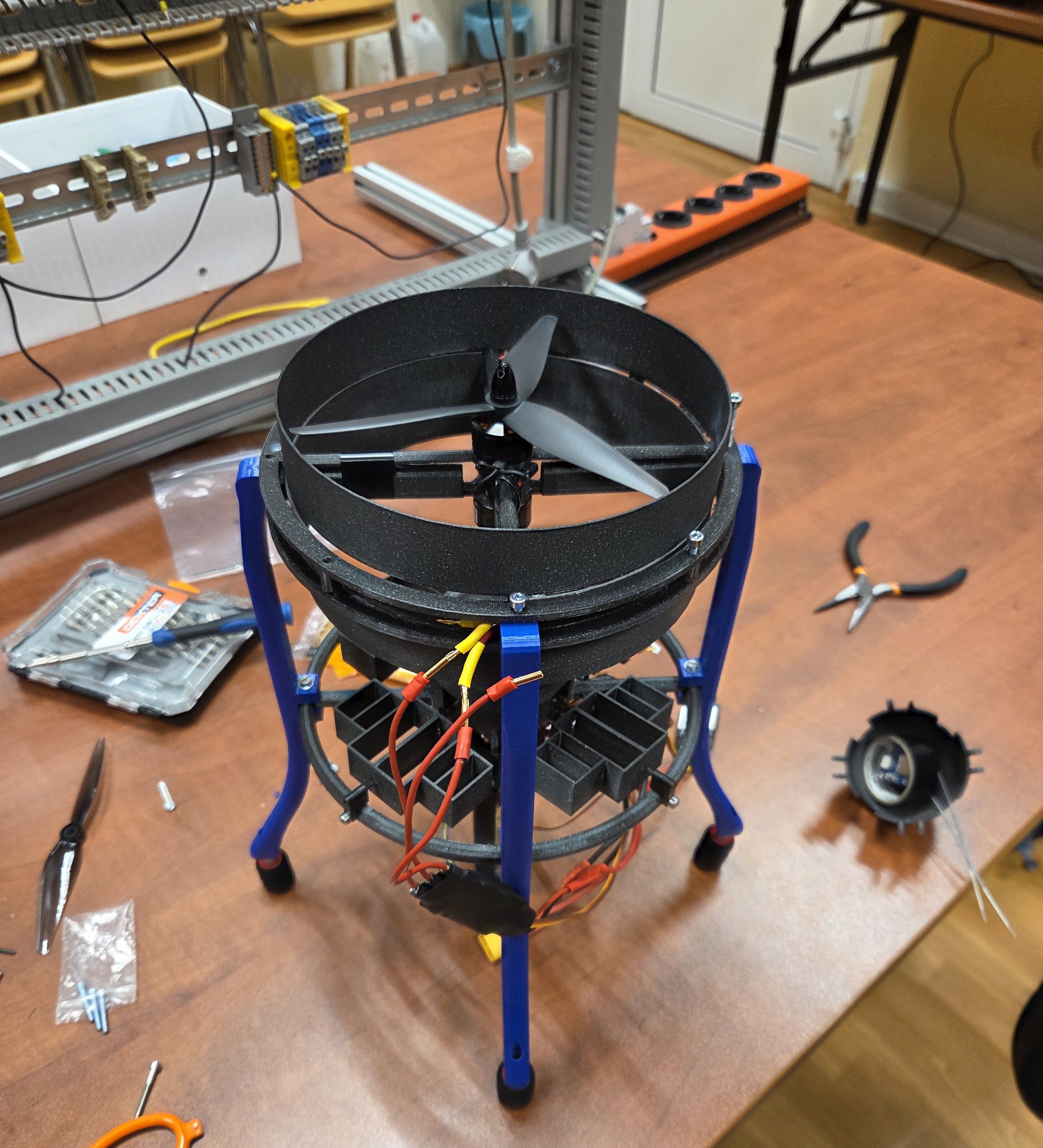
Drones
We build drones and flying platforms. Not only for competitions.
Our mission
We develop students’ engineering skills by working on real technology projects.
We believe you learn best by building — that’s why every project ends with something that actually works.
Explore the rover →
Meet our team

PUT Lunar Rover
Our interactive PUTLunarTeam logo — click an element on the graphic or choose from the list.
How to explore the rover?
Click any element on the graphic or choose from the list below.
Selecting an element will reveal details about the solutions we use.
- ⭐ LunarTeam
- 📦 Chassis
- 🛞 Suspension
- 📡 Mast
- 🦾 Robotic arm
⭐ LunarTeam
PUT Lunar Team is a student research club at Poznań University of Technology focused on building a lunar rover.
About us
- ERC — European Rover Challenge
- ARC — Anatolian Rover Challenge
📦 Chassis
The rover chassis is the main load-bearing structure made of a lightweight aluminum alloy.
Specification
- Material: …..
- Weight: …..
🛞 Suspension
The suspension system is based on two wheels……
Wheel parameters
- Diameter: ….
- Drive: …..
📡 Mast
A communication mast with a directional antenna and a panoramic camera for remote navigation.
Connectivity
- Band: ……..
- Range: …….
🦾 Robotic arm
A 6-DOF robotic arm with a gripper for sampling and manipulation tasks.
Parameters
- Degrees of freedom: 6-DOF
- Payload: …..
- Control: ….
Grants and funding
Modular Mobile Platform for Field Research
The project Modular Mobile Platform for Field Research, carried out by KN CybAiR at Poznań University of Technology, has received funding from the Polish state budget under the Student Scientific Clubs Drive Innovation programme.
The funds support the construction and development of a modular research platform designed for exploration in hard-to-reach environments — and serve as the foundation for our future competition rover. The project integrates mechanical engineering, electronics, and control algorithms into a single unified system.

Autonomous Flight System Resilient to Strong Winds
The project, Autonomous Flight System Resilient to Strong Winds for Search and Rescue after Natural Disasters, carried out by KN CybAiR at Poznań University of Technology, received funding from the Polish state budget under the Student Scientific Clubs Drive Innovation programme.
We are building and developing research rigs to test flight autonomy algorithms resilient to strong winds. The project combines control algorithms, state estimation and machine learning to create the basis for a system that enables stable and safe drone flight in harsh weather conditions, with search-and-rescue missions in mind.

Our partners
Follow us on Facebook and stay up to date with our projects.
Find us on Facebook →